This problem now becomes a Tough Nut
because nobody has sent in a solution for part (3). Part (3) uses
the multiplication of quaternions as in (1), the steps of the
proof are described in the question and the proof is about 5
lines.
Note also that the quaternion product
explored here (of two 4-dimensional numbers) is simply a
combination of the scalar product and the vector product of the
corresponding vectors in 3-dimensional space which explains where
the definitions of these products of vectors comes from.
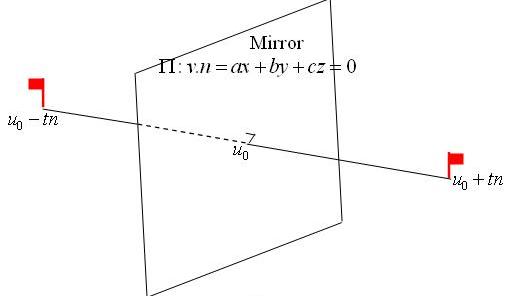
You need to know that, as $v = u_0$ is a point on the
mirror-plane $\Pi$, by simply substituting the co-ordinates
of the point in the equation of the plane, you get
$u_0\cdot n =0$.
The first two parts have been solved by
Andrei of Tudor Vianu National College, Bucharest,
Romania.
(1)We first multiply the pure quaternions:
v1 = x1i + y1j + z1k and v2 = x2i + y2j + z2k. to obtain:
We observe that the quaternion product is a combination of the scalar product
and the vector product of the corresponding vectors in R3, that is:
v1v2 = -( v1 ·v2) + (v1 ×v2)
(2) Now, considering all the points on the unit sphere v = xi + yj + zk where
|v| = Ö(x2 + y2 + z2) = 1, we calculate v2.
We find v2 = -x2 -y2 - z2 = -1
so there are infinitely square roots of -1 in R3.
In an alternative notation the points on the unit sphere are given by:
v = cosqcosfi + cosqsinfj + sin2 qk where
|v| = Ö(cos2 qcos2 f+ cos2 qsin2 f + sin2q) = 1.