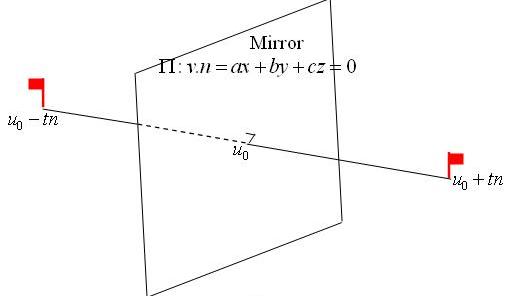
(3) Take any unit pure quaternion $n$ ($n^2=-1$) and
consider the plane $\Pi$ through the origin in ${\bf
R^3}$ with normal vector $n$. Then the plane $\Pi$ has
equation $a x + b y + c z = 0 = v\cdot n$.
If $u_0$ is a point on the plane $\Pi$ then $u_0\cdot n
=0$ and the points $u_0+ t n$ and $u_0 - t n$ are
reflections of each other in the plane.