
|
In this question we see how quaternions are used to give rotations of ${\bf R^3}$. |
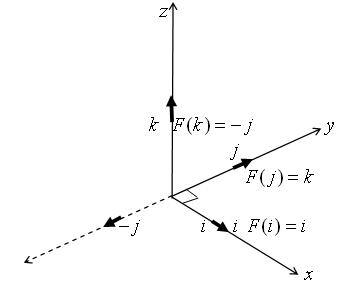 |
(1) Consider the quaternion $$q = {1\over \sqrt 2} + {1\over \sqrt 2}{\bf i} + 0{\bf j} + 0 {\bf k}.$$ (a) Show that the multiplicative inverse of $q$ is given by $$q^{-1} = {1\over \sqrt 2} - {1\over \sqrt 2}{\bf i}$$ (b) Show that for all scalar multiples $x = t{\bf i}$ of the vector ${\bf i}$, $q x = x q$ and hence $q x q^{-1} = x$. This proves that the map $F(x) = q x q^{-1}$ fixes every point on the x axis.\par (c) What happens to points on the y axis under the mapping $F$? To answer this work out $F({\bf j})$. Also compute $F({\bf k})$ and show that ${\bf k} \to {\bf -j}.$ |
|
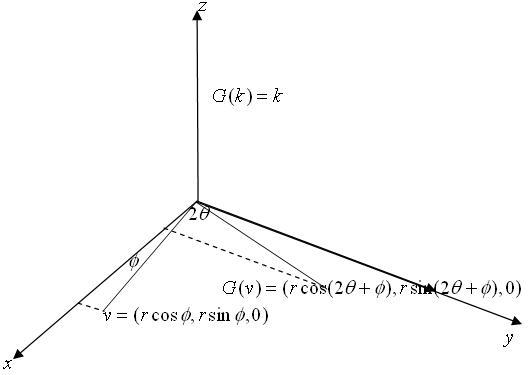
(2) Consider the quaternion $q = \cos \theta + \sin
\theta {\bf k}$
(a) Show that $\cos \theta - \sin \theta {\bf k}$ is
the multiplicative inverse of $q$.
(b) Show that $q{\bf k}q^{-1}={\bf k}$.
(c) Show that $$q v q^{-1}= r(\cos (2\theta + \phi)
{\bf i} + \sin (2\theta + \phi){\bf j})$$ where $v =
(r\cos \phi {\bf i} + \sin \phi {\bf j}+0{\bf k})$ and
hence that the map $G(v)= q v q^{-1}$ is a rotation
about the z axis by an angle $2\theta$.
|
 |