Links to the University of Cambridge website
 Links to the NRICH website Home page
Links to the NRICH website Home page

Nurturing young mathematicians: teacher webinars
30 April (Primary), 1 May (Secondary)
30 April (Primary), 1 May (Secondary)
Quaternions and Rotations
Age 16 to 18
Challenge Level 
 |
In this question we see how quaternions are used to give rotations of ${\bf R^3}$. |
 |
(1) Consider the quaternion $$q = {1\over \sqrt 2} + {1\over
\sqrt 2}{\bf i} + 0{\bf j} + 0 {\bf k}.$$ (a) Show that the
multiplicative inverse of $q$ is given by $$q^{-1} = {1\over \sqrt
2} - {1\over \sqrt 2}{\bf i}$$ (b) Show that for all scalar
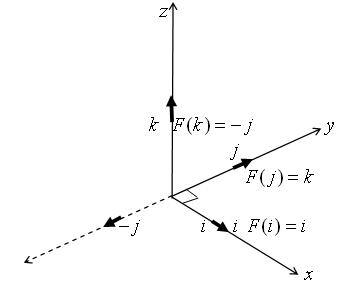
multiples $x = t{\bf i}$ of the vector ${\bf i}$, $q x = x q$ and
hence $q x q^{-1} = x$. This proves that the map $F(x) = q x
q^{-1}$ fixes every point on the x axis.
(c) What happens to points on the y axis under the mapping
$F$? To answer this work out $F({\bf j})$. Also compute $F({\bf
k})$ and show that ${\bf k} \to {\bf -j}.$
|
|
(2) Consider the quaternion $q = \cos \theta + \sin \theta
{\bf k}$
(a) Show that $\cos \theta - \sin \theta {\bf k}$ is the
multiplicative inverse of $q$.
(b) Show that $q{\bf k}q^{-1}={\bf k}$.
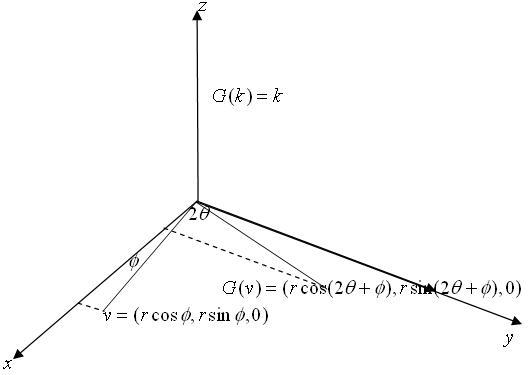
(c) Show that $$q v q^{-1}= r(\cos (2\theta + \phi) {\bf i} +
\sin (2\theta + \phi){\bf j})$$ where $v = (r\cos \phi {\bf i} +
\sin \phi {\bf j}+0{\bf k})$ and hence that the map $G(v)= q v
q^{-1}$ is a rotation about the z axis by an angle $2\theta$.
|
 |
To read about number systems,
where quaternions fit in, why there are no three dimensional
numbers and numbers in higher dimensions, see the NRICH article
What
Are Numbers?
If you want to know how
quaternions are used in computer graphics and animation in film
making read the Plus Article Maths
goes to the movies .
The NRICH article The use of
maths in computer games tells you a lot more about the subject.
Though this article uses complex numbers and vectors and not
quaternions,the mathematics is the same with quaternions which just
give a shorter and neater way of writing down and working with the
functions that give reflections and rotations in 3-space
.
You may also like
Flexi Quads
A quadrilateral changes shape with the edge lengths constant. Show the scalar product of the diagonals is constant. If the diagonals are perpendicular in one position are they always perpendicular?
A Knight's Journey
This article looks at knight's moves on a chess board and introduces you to the idea of vectors and vector addition.
Napoleon's Theorem
Triangle ABC has equilateral triangles drawn on its edges. Points P, Q and R are the centres of the equilateral triangles. What can you prove about the triangle PQR?